SPI Protocol
SPI signal lines, transfer modes, frames and VHDL implementation points.
What is SPI?
The SPI (Serial Peripheral Interface) protocol is a synchronous serial protocol developed by Motorola in the 1980s. It is widely used in embedded systems for communication between a microcontroller or FPGA and peripherals such as sensors, ADC/DAC converters, Flash memories, or displays.
Key characteristics:
- Synchronous: a shared clock (SCK) drives all transfers
- Full-duplex: simultaneous transmission and reception
- Master/Slave: the master generates the clock and selects the slave
- No addressing: selection is done via a dedicated SS_N signal
SPI Signals
| Signal | Direction | Description |
|---|---|---|
| SCK | Master → Slave | Serial Clock |
| MOSI | Master → Slave | Master Out Slave In |
| MISO | Slave → Master | Master In Slave Out |
| SS_N | Master → Slave | Slave Select, active low |
With multiple slaves, the master has one SS_N signal per slave. MOSI, MISO, and SCK are shared (bus).
SPI Modes (CPOL / CPHA)
SPI defines 4 modes based on two parameters:
- CPOL (Clock Polarity): idle state of SCK - 0 = low, 1 = high
- CPHA (Clock Phase): sampling moment - 0 = leading edge, 1 = trailing edge
| Mode | CPOL | CPHA | Sampling | Description |
|---|---|---|---|---|
| 0 | 0 | 0 | SCK rising edge | SCK idle low, sample on rising |
| 1 | 0 | 1 | SCK falling edge | SCK idle low, sample on falling |
| 2 | 1 | 0 | SCK falling edge | SCK idle high, sample on falling |
| 3 | 1 | 1 | SCK rising edge | SCK idle high, sample on rising |
Mode 0 (CPOL=0, CPHA=0) is the most common and is used in platform exercises.
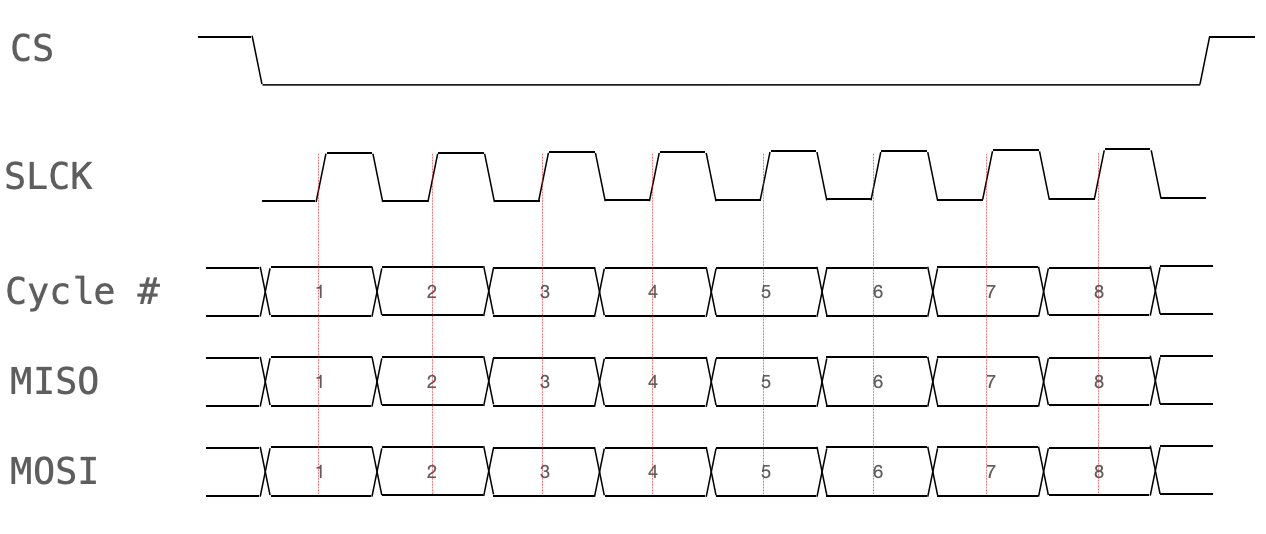
SPI Frame
A SPI transaction proceeds as follows:
- Master asserts SS_N low to select the slave
- Master generates SCK pulses
- Each SCK cycle transfers 1 bit in each direction (MOSI and MISO)
- Data is transmitted MSB first (most common convention)
- Master deasserts SS_N to end the transaction
For an 8-bit frame:
VHDL Implementation
Put SPI implementation into practice with the following exercises:
Available SPI exercises:
- SPI Slave (Mode 0) - Implement a complete SPI slave receiver with synchronization and edge detection
- SPI Master (simplified) - Build a basic SPI master controller
- SPI Master Mode 0 - SPI master with configurable clock divider
- Complete SPI Master - Advanced SPI master with multi-mode support (advanced)
Key Points
- Synchronization: SPI signals (SCK, SS_N, MOSI) come from an external clock domain → always resynchronize them with a double register before use in the system domain
- CPOL/CPHA: always check the slave device's datasheet. A mode mismatch causes corrupted data with no visible error
- SS_N must stay asserted for the entire transaction. If SS_N deasserts between bytes, the slave resets its bit counter
- SCK frequency: limited by the slave's maximum frequency and MISO propagation delay
- Bit order: MSB first is standard, but some devices use LSB first - check the documentation
Advantages and Disadvantages
| Advantages | Disadvantages |
|---|---|
| Simple to implement | One SS_N pin per slave (many pins) |
| High speed (tens of MHz) | No acknowledgment (ACK) |
| Full-duplex | Limited distance |
| Flexible protocol | No native error detection |
📝 Test your knowledge - Chapter quiz